Conducere autonomă cu buget redus
De ce contează: Vehiculele cu conducere autonomă sunt de obicei încărcate cu rețele de senzori scumpe, cum ar fi lidar, radar și camere de înaltă rezoluție. Dar un constructor de bricolaj a arătat că, pentru anumite medii închise, puteți renunța la toate echipamentele elegante și puteți obține totuși conducerea autonomă cu o singură cameră.
YouTuber Austin Blake este unul dintre acei oameni care se întâmplă să aibă un kart auto-construit întins acasă. După ce l-a botezat „Crazy Cart”, a decis să-l transforme în propria sa platformă de testare autonomă. Pentru aceasta, el a proiectat mai întâi o pistă improvizată așezată pe podeaua atelierului său, folosind markere de bandă contrastante. După cum puteți vedea în imaginea de mai jos, spațiul este destul de îngust, dar la fel este și raza de cotitură a căruciorului.

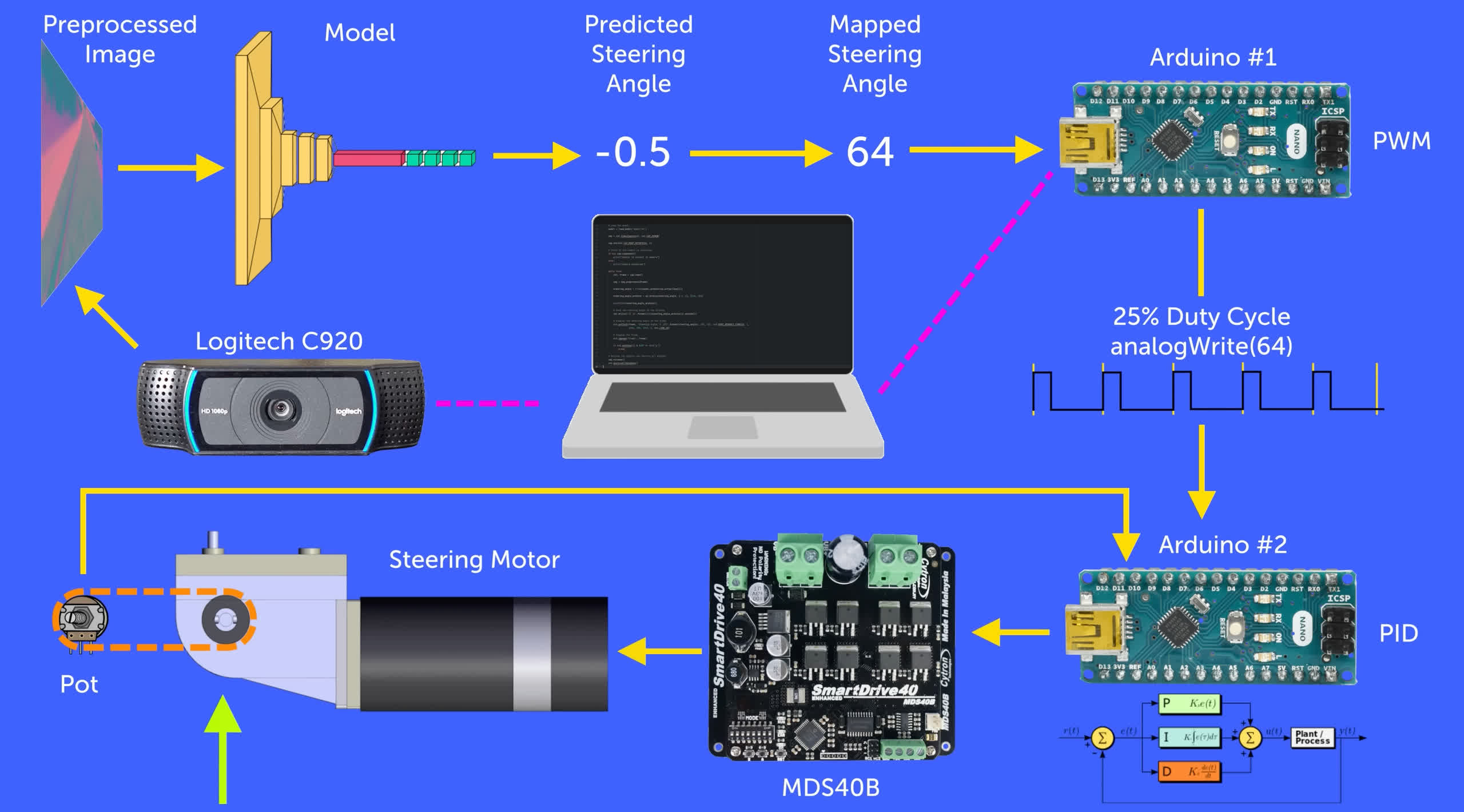
Apoi a venit partea grea – oferindu-i de fapt lui Crazy Cart abilitățile sale de auto-conducere. Pentru aceasta, Blake a folosit o tehnică numită clonare comportamentală printr-un model de rețea neuronală antrenat. Mai întâi, el a înregistrat aproximativ 15.000 de imagini în timp ce conducea manual kartul pe pistă, folosind unghiurile de virare din fiecare punct ca etichete de antrenament. Apoi a introdus aceste date într-o rețea neuronală convoluțională, care a învățat să asocieze intrările de imagine cu direcțiile de direcție corespunzătoare.
Obținerea unui model performant a luat destul de multă încercare și eroare. Testele inițiale au eșuat, deoarece rețeaua a avut dificultăți în a distinge marginile pistei și a naviga în viraje strânse. Blake a încercat trucuri de mărire a datelor, ajustând hiperparametrii, folosind mai multe camere și chiar adăugând lentile cu unghi larg pentru a îmbunătăți câmpul vizual.

Cu toate acestea, adevărata descoperire a venit atunci când a adăugat bandă albastră strălucitoare ca margine exterioară, sporind contrastul.
Cu traseul clar definit, creația sa ar putea să se deplaseze în mod autonom în jurul pistei de podea folosind doar vederea monoculară – nu sunt necesari senzori scumpi.
Totuși, a fost nevoie de un total de trei Arduinos. Unul a transmis predicțiile de direcție de la computer către al doilea Arduino, care a combinat aceste date cu feedback-ul pozițional pentru a acționa un motor care controlează unghiul de direcție. Al treilea Arduino a manevrat clapeta de accelerație furnizând semnale de control controlerului de viteză al kartului.
Desigur, acesta este un caz de utilizare destul de restrâns în comparație cu navigarea pe drumurile publice reale, cu complexitatea și imprevizibilitatea lor. Blake recunoaște cu ușurință că aceasta din urmă este o provocare exponențial mai grea, care, fără îndoială, necesită date mai bogate ale senzorilor, dincolo de doar camere.
Totuși, proiectul este o demonstrație impresionantă despre cât de capabilă poate fi învățarea automată modernă în a distila inteligența de conducere din intrările umile de viziune. Scalarea proiectului va necesita probabil mult mai multe date de instruire, dar o singură persoană poate face atât de multe.